In this article we will highlight how to assign PID controller function block in with mode; in particularly Auto or manual. This applies to all Yokogawa STARDOM product line; such as FCJ, FCN, FCN-RTU. This might be a no brainer to some but for a beginners, a good reference.
Nevertheless, Yokogawa Logic Designer had a build in Global Variable called GM_MODE_MAN and GM_MODE_AUT for manual and automatic modes for PID controllers. That is what we should be using to assign the modes. There other modes such as GM_MODE_IMAN, GM_MODE_OS, etc, but they are not part of this discussion and will be covered in the next article.
You have to define the GM_MODE_* variable as shown below.

The mode are assigned to the PRM variable using the MOVE function block. The screenshot below outline how it is done.

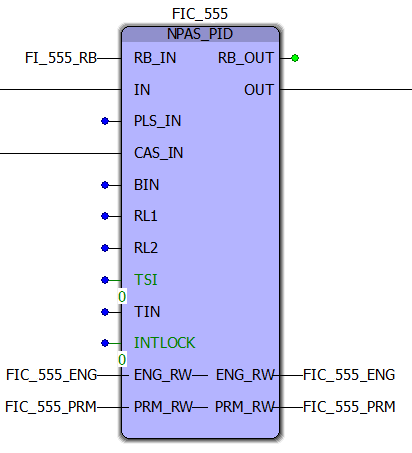
Just to close the “loop”, below is a screenshot of how the PRM variable is used in a NPAS_PID function block.